Intro Architectural Robotics IAP Workshop
Massachusetts Institute of Technology
Year: 2022
Instructor: Myles Sampson
Students: Arthur Rodrigues, Carolyn Tam, Emma Jurczynski, Jin Gao, Natalie Pearl, Tim Cousin,
Critics: Caitlin Mueller, John Ochensdorf, Diego Pinochet, Sandy Curth, Gil Sunshine, Zain Karsan,
Link
Students: Arthur Rodrigues, Carolyn Tam, Emma Jurczynski, Jin Gao, Natalie Pearl, Tim Cousin,
Critics: Caitlin Mueller, John Ochensdorf, Diego Pinochet, Sandy Curth, Gil Sunshine, Zain Karsan,
Link
The Robotic Arm is a common tool for automotive and engineering practices.
However, the endless opportunities for architectural applications make it an up-and-coming tool for architects and designers.
Understanding the fundamentals of robotic programming is key to unlocking the potential applications of robotics in architecture and design.
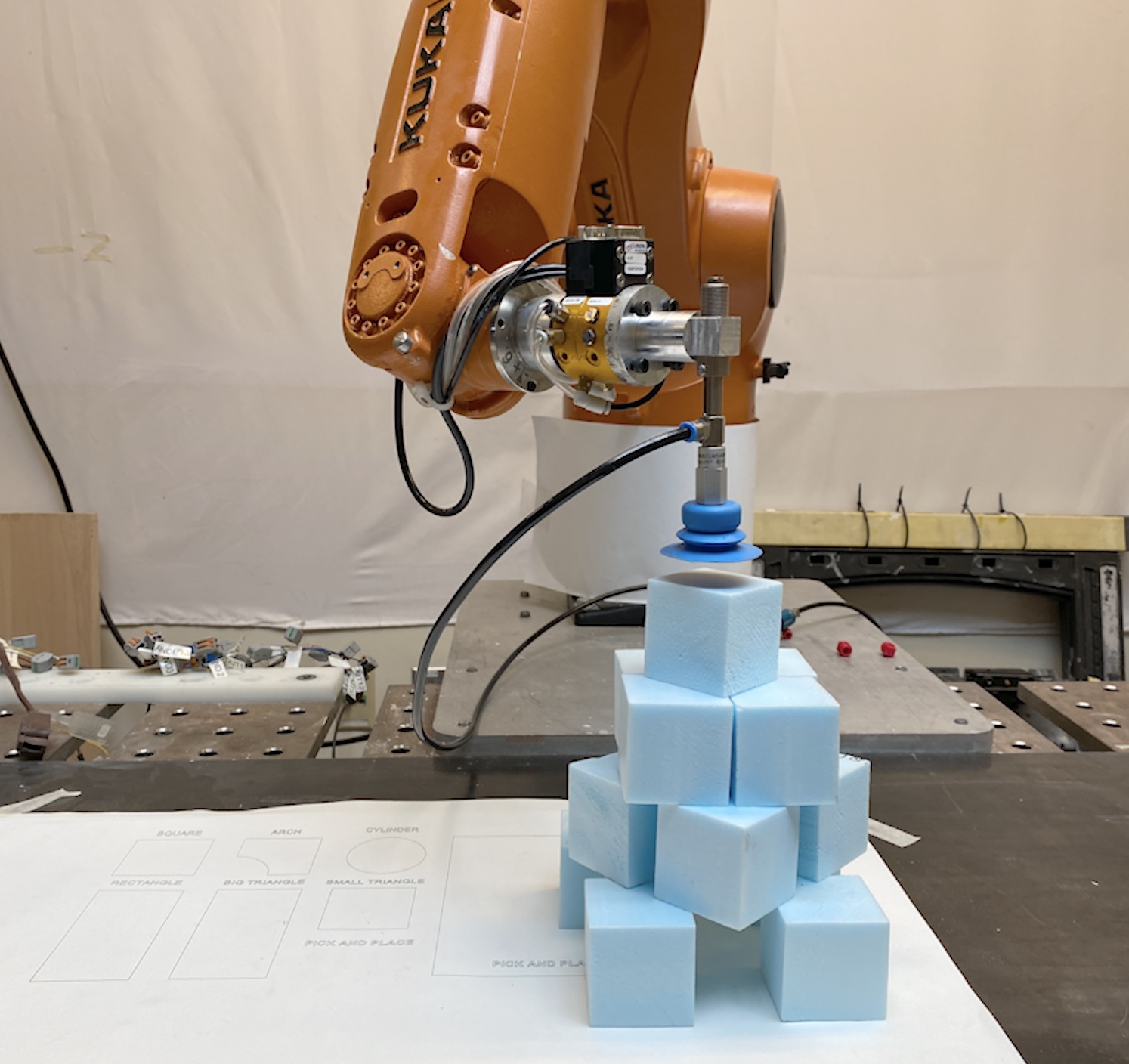
This Spring 2022 workshop is an introduction to the MIT Department of Architecture robotic arm for graduate level students.
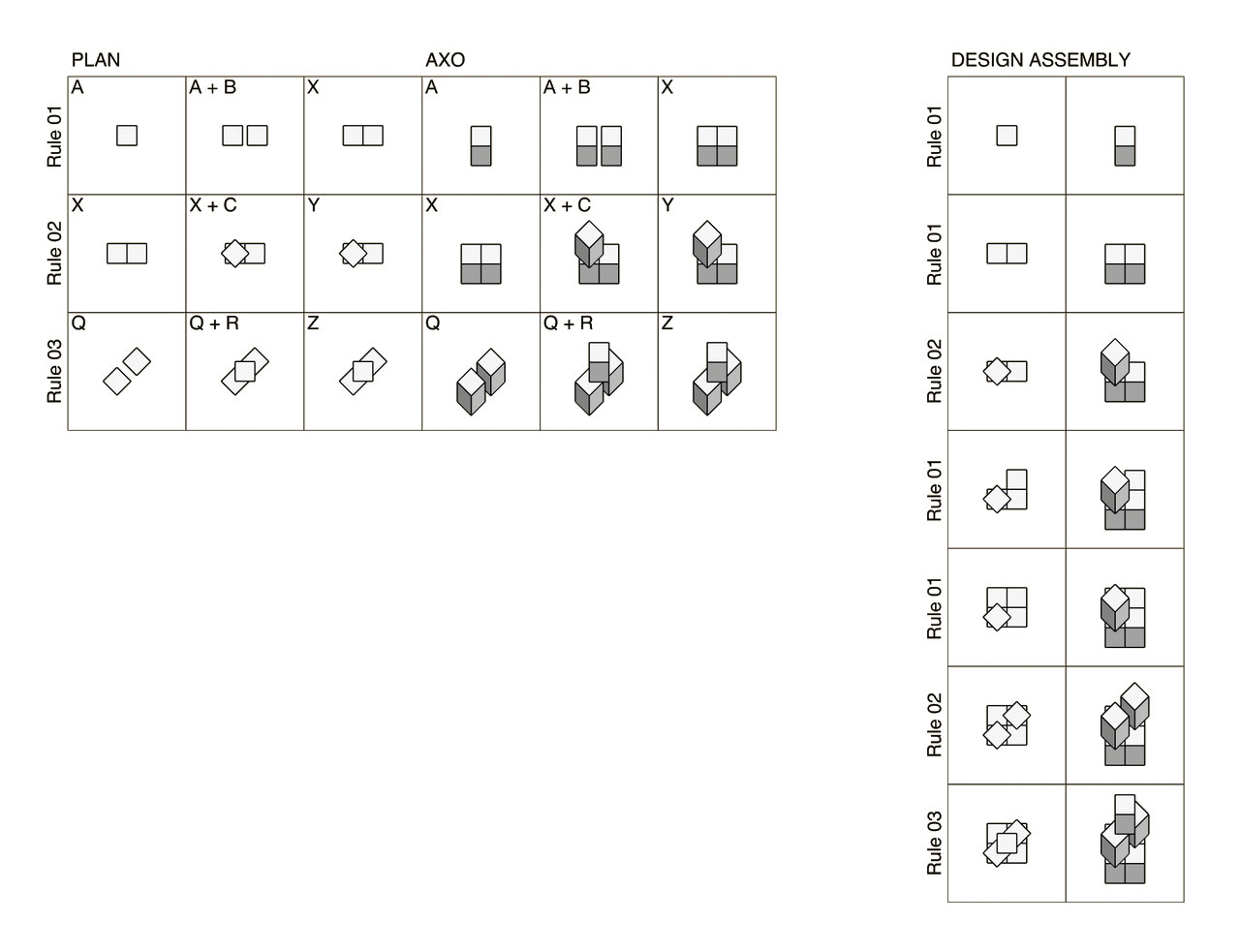
Through the Shape Grammar formalism, a rule-based design schema, we will explore architectural robotics.
Tower of Power
Take A Seat
Tower Chord
The Passageway
Archy
UP